ヘルプ
基本パラメータ
| 相数 | モータを駆動するインバータのレグ数やコイルのグループ数を指します。本ツールでは3相SRモータにのみ対応しておりますが、今後4相や5相にも対応する予定です。 |
|---|---|
| 定格出力[W] | 軸出力ともいいます。本ツールでは最大出力を意味します。 |
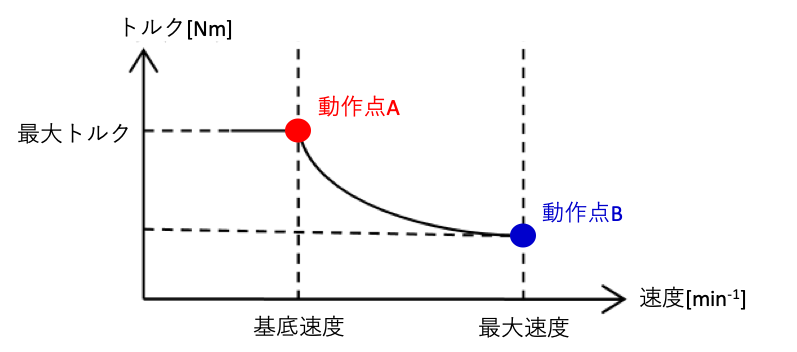
| 基底速度[min-1] | 最大トルクを出力できる最大の速度(回転数)のことです。この速度での定格出力となる条件を動作点Aと呼称します(図1参照)。 |
| 最大速度[min-1] | この速度での定格出力となる条件を動作点Bと呼称します(図1参照)。 |
| 電源電圧[V] | モータを駆動するインバータの直流電圧(入力電圧)を指します。 |
| ロータ外径下限・上限[mm] | 本ツールではロータ外径をもとに各部寸法を計算するため、ロータ外径の範囲を入力する必要があります。 |
詳細パラメータ
| スロット数(ステータ-ロータ) | ステータとロータのスロット数の組み合わせを選択します。本ツールでは3相で一般的な6-4、12-8、18-12に対応しています。 |
|---|---|
| 最大電流密度[A/mm2] | 許容できる最大電流密度(コイル導線の単位断面積あたりの最大電流)を設定します。モータの冷却方式によって変わります。 |
| 最大銅損[W] | 許容できる最大銅損(ジュール損)を設定します。モータの冷却や効率に影響します。 |
| ギャップ長[mm] | ロータ突極とステータ突極が対向するときの、これらの間隔を指します。 |
| スロット占積率 | スロット断面積に占めるコイル断面積(導線断面積の総和)のことです。巻線の種類によって変わります。 |
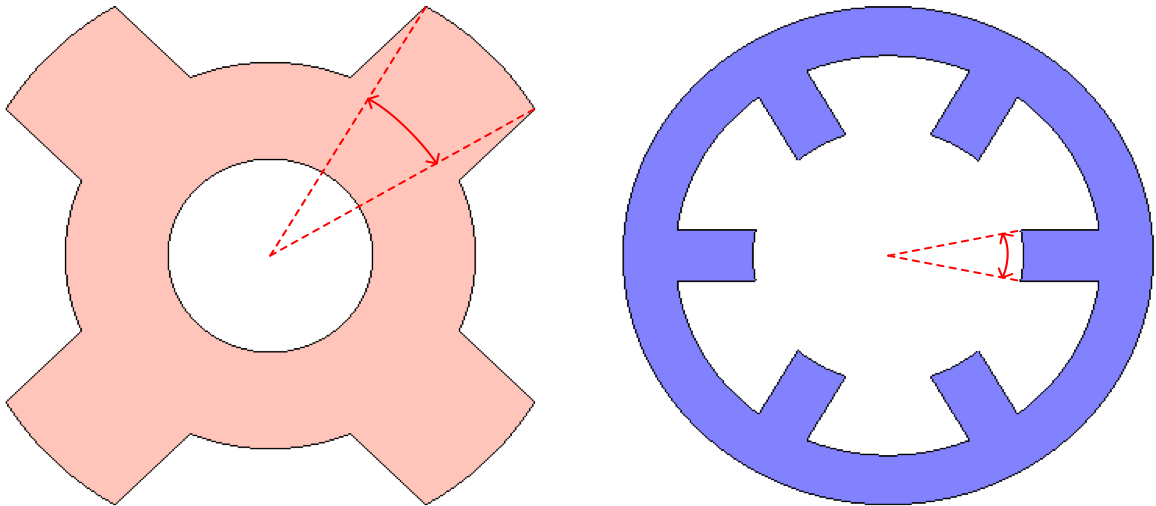
| ロータ突極角度[deg] | ロータ突極のギャップに面する部分の角度です(図2参照)。Feasible triangleと呼ばれる自己始動が可能な形状の指針の範囲でのみ設計を行います。 |
| ステータ突極角度[deg] | ステータ突極のギャップに面する部分の角度です(図2参照)。Feasible triangleと呼ばれる自己始動が可能な形状の指針の範囲でのみ設計を行います。 |
| 抵抗率[Ωm] | 導線の抵抗率を設定します。 |
|---|---|
| 鉄心磁束密度[T] | 鉄心材料の磁束密度B50(5000A/mにおける磁束密度)または飽和磁束密度を設定します。 |
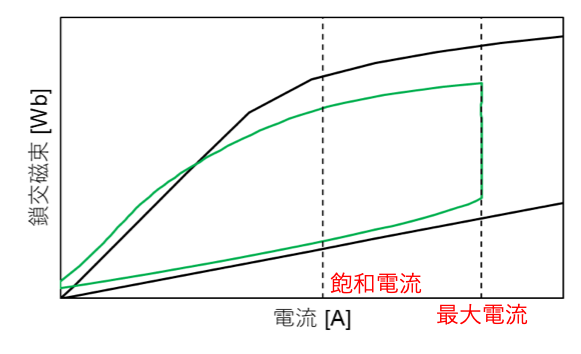
| 磁気飽和度 | 飽和電流に対する動作点A(基底速度での定格出力)での最大電流の比を指します(図3参照)。飽和電流は次式にて計算されます。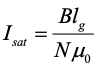 |
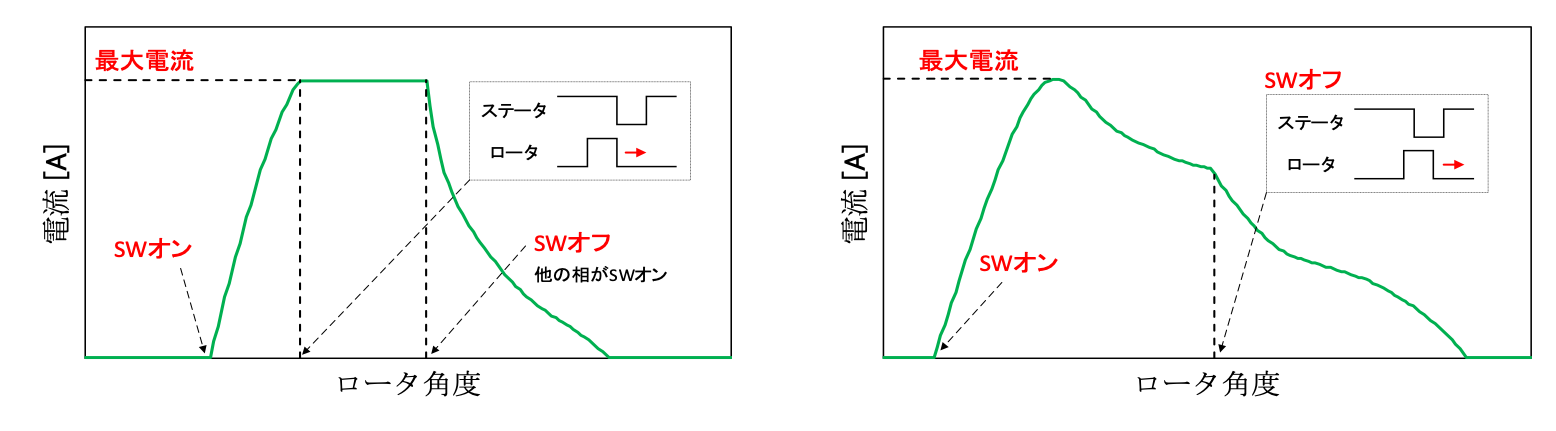
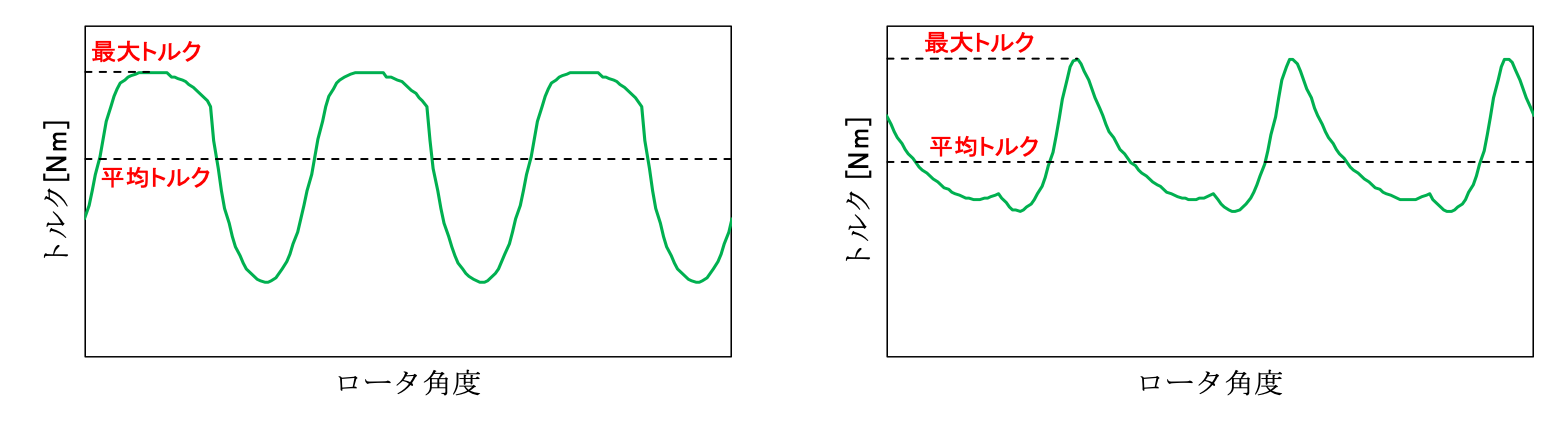
| トルクの平均値と最大値の比 (動作点A) | 動作点A(基底速度での定格出力)におけるトルク波形(ロータ角度によるトルク変化)の平均値に対する最大値の比を指します(図4参照)。実際は電磁界解析などを行い、適切な値を設定する必要があります。なお、動作点Aではパルス電流駆動を想定しています。 |
|---|---|
| トルクの平均値と最大値の比 (動作点B) | 動作点B(最大速度での定格出力)におけるトルク波形(ロータ角度によるトルク変化)の平均値に対する最大値の比を指します(図4参照)。実際は電磁界解析などを行い、適切な値を設定する必要があります。なお、動作点Bではシングルパルス電圧駆動を想定しています。 |
設計結果
| コイル巻数 | 各相のコイルをすべて直列に接続することを前提として、1コイルあたりの巻数を表示します。 |
|---|---|
| 最大電流(動作点A) [A] | 動作点A(基底速度での定格出力)における電流の最大値を表示します(図5参照)。ロータ突極とステータ突極が対向し始める角度にて、この電流値となるように通電を開始します。また、通電終了は他相が通電開始するときを想定しています。なお、動作点Aではパルス電流駆動を想定しています。 |
| 最大電流(動作点B) [A] | 動作点B(最大速度での定格出力)における電流の最大値を表示します(図5参照)。ロータ突極とステータ突極が対向し始める角度にて、この電流値となるように通電を開始します。また、通電終了はステータ突極の3分の2がロータ突極と対向するときを想定しています。なお、動作点Bではシングルパルス電圧駆動を想定しています。 |